Manipulateur d’échantillons
 Positionnement motorisée 2 axes (Polaire et Azimutale) pour le positionnement d’un échantillon pour la croissance ou l’analyse de surface.
Positionnement motorisée 2 axes (Polaire et Azimutale) pour le positionnement d’un échantillon pour la croissance ou l’analyse de surface.
Moteur pas à pas couplé à une réduction de vitesse associé avec des codeurs optiques : Précision 0,009° pour l’azimut et 0,004° pour le polaire
Écran tactile NEXTION pour fonctionnement autonome
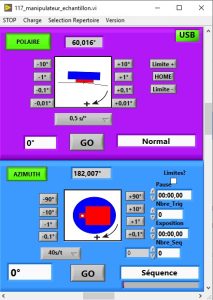
Interface Homme Machine LabVIEW pour automatisation de séquence, sauvegarde de position et gestion d’une caméra
Liaison IHM LabVIEW par USB Full Speed (micro-contrôleur PIC 18F4550 sous MPLABX)
Cible programmée : XC7S25csga225 sous VIVADO
Positionnement Échantillon HREELS
 Positionnement motorisée 2 axes (Rotation et Translation) pour le positionnement d’un échantillon
Positionnement motorisée 2 axes (Rotation et Translation) pour le positionnement d’un échantillon
Moteur courant continu couplé à une réduction de vitesse associé avec des codeurs magnétiques: Précision 0,0002° pour la rotation et 0,244µm pour la translation
Écran tactile NEXTION pour un fonctionnement autonome
Cible programmée : XC7S25csga225 sous VIVADO
Ablation Laser
Évaporation par ablation laser d’un échantillon à analyser
Déplacement a vitesse variable de l’échantillon entre 2 fins de courses
Moteurs pas à pas
Boitier autonome
Réglages et mise en fonctionnement par codeurs optiques et écran LCD
Cible programmée : XC3S400PQ208 sous ISE 14.7